Assignment 1: Sketching a robot arm
Unit learning outcomes of CIS094-1 Robot Principles & Design Assignment Demonstrate the following knowledge and understanding: Describe and calculate the positions of the joints of a robot arm including motion transmission of mechanical structures.
What am I required to do in this Robot Principles & Design Assignment ?
- Draw the sketch of a 6-joint standard industrial robot arm
- Specify the link length and link twist for all links, and justify your specifications
- Specify the joint angle and link offset for all joints, and justify your specifications
- Assign frames to all joints and explain the principles you follow when assigning the frames
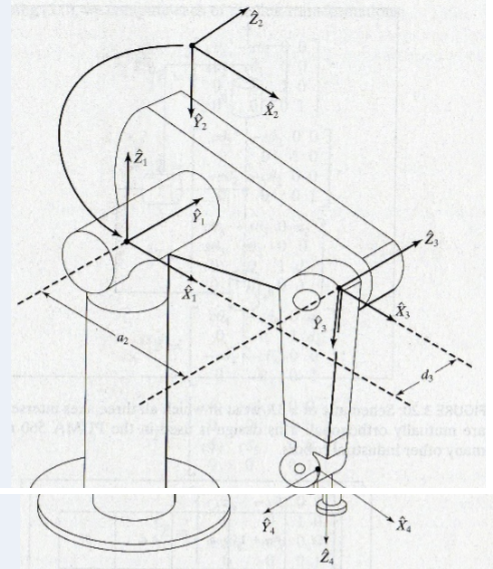
- Given the diagram below, find out the position of the origin of Frame {4} in Frame {1}, and provide the procedures and
calculations of your findings - Explain the displacement and rotations from a starting position to a destination position (you decide both positions).
What do I need to do to pass? (Threshold Expectations from UIF)
- Identify joints and links of the given mechanical structures
- Identify the components for motion transmission in a given structure.
- Discuss the advantages and disadvantages of the frame assigning approach you propose in task 4 – whether if they can
make calculation in task 5 easier.
ORDER This CIS094-1 Robot Principles & Design Assignment NOW And Get Instant Discount