Subject Code & Title : ENG742s1 P24344 Control Systems
Assignment Type : Coursework 2
1 Aims :
The aim of this coursework is to design controllers with a variety of techniques for the Servo set servo-mechanism used in the first coursework fulfilling stability and performance requirements, and evaluate them through simulation. The closed-loop system should aim to achieve:
ENG742s1 P24344 Control Systems Coursework 2 – Portsmouth University UK.

• a rise time of 5 seconds, or better;
• 15% overshoot to a step input or better; and
• minimal oscillation on the step response
Please note, the different sets of experimental data were obtained from Servo set hardware with different capabilities and limitations. Data sets are provided for this coursework to obtain models in the form of transfer functions for the purpose of performance analysis and controllers design. The above specification is intended as a guide, and you should try to achieve the best performance that you can, whether it is better than the specification, or slightly worse.
2.Assessment Guidelines :
The formal report has to be submitted by the deadline to be marked. You will be marked solely on the content of the report. Please make sure that the work you submit is clear, comprehensive and well presented. Presentation that is either untidy, or lacks mathematical precision, will be penalized. You will be required to demonstrate an understanding of the control systems design specifications. You should also familiarize yourself with the Root-Locus, frequency response and PID Control Systems Design methods. You will use MATLAB as a design, simulation and evaluation package to produce time and frequency responses, and root locus graphs that will be the basis for your assessment. Your graphs should be well presented (neat, clear and contain all necessary information). It is very important to focus your effort on producing results, interpreting and offering explanations, analysis and conclusions where appropriate.
3.Radar Scanner System Experimental Data
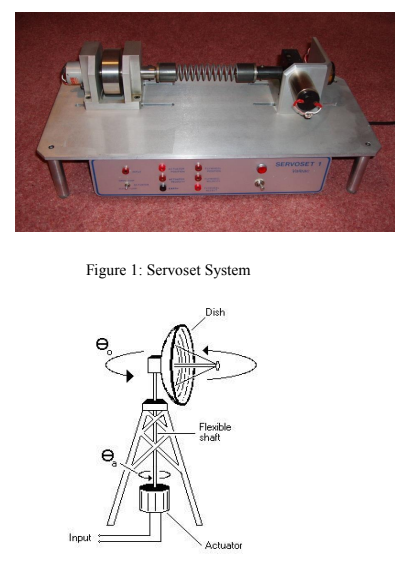
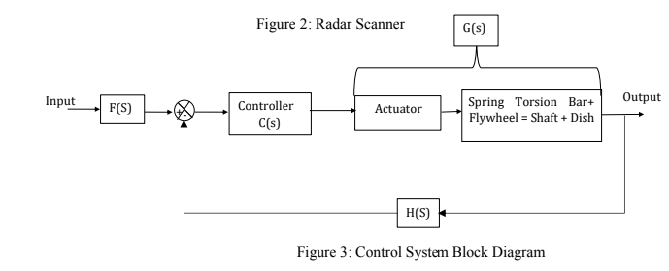
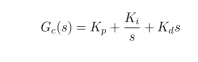
The recorded experimental data were obtained from a Servo set system shown in figure 1 representing a radar scanner system shown in figure 2. In order to design an angular position control system in a laboratory setting for a radar scanner system a Servo set system having the same configuration was used as an experimental rig from which response to a step set point were recorded and to be used for control systems analysis and design. Figure 3 shows the block diagram of the Servo set system feedback control. H(s), the position sensor is to be taken as unity as this sensor dynamics is much faster than that of the system.
4. The Servo set Model(s)
Students should have access to the experimental data sets provided on Moodle, which should allow them to develop third and fourth order models. Third order models should be used for analysis and design and fourth order models for testing.
5.System Identification :
Use the System Identification App in MATLAB to estimate the overall open loop system transfer function from your experimental data set.
1.Estimate the transfer function as a 4th order model with order 3 transfer function numerator.
2.Estimate the third order model with order 2 transfer function numerator.
3.Plot the step responses of the actuator+shaft+dish system modelled with the 4th and 3rd order transfer functions and compare the responses.
4.Estimate the third order model with order 1 transfer function numerator.
5.Estimate the third order model with order 0 transfer function numerator.
6.Plot the step responses of the actuator+shaft+dish system modelled with e three 3rd order transfer functions (order 2, 1 and 0 numerator) and compare the responses.
Use the three 3rd order transfer functions (order 2, 1 and 0 numerator) in the control systems analysis and design in the following sections
6.Matlab Tools for Controller Design
Three MATLAB Control Design tools should be used to design the Controller so that the closed loop system fulfils the performance requirements. These are the PID tuner, the root locus design tool and the Bode frequency response editing tool.
7.Controller Design
The basic strategy is to design an in-series compensator with unity negative feedback. The compensator is designed, investigated and tested using MATLAB and its associated control toolboxes and apps.
Matlab may be launched form the Apps Any where tool on the University network. Students may also obtain a licensed copy for their own computer.
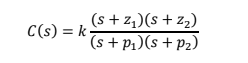
Controller design should to be carried out using MATLAB. It is recommended that students attempt to design a PID (proportional-integral-derivative) controller, which has a transfer function of the form:
hence the name, since Kp reflects a term which is proportional to error, Ki reflects a term which is the integral of the error signal over time, and Kd reflects a terms which is the instantaneous derivative of the error signal.
The compensator transfer function may equivalently be expressed as

The final form of the PID controller is useful, since it allows the interpretation of the controller as having a quadratic – or second order – numerator (and therefore one with two zeros, that may be placed anywhere on the complex plane); a single pole (which must be placed correctly on the complex plane; and a variable gain parameter (that is typically seen with root locus based calculations, and influences the actual locations of the closed-loop poles along the branches of the locus).
The baseline objective is to use the MATLAB PID Tuner, root locus design tool and the frequency response Bode editor to design a suitable PID controller using the tools, and determine the PID compensator parameters. Third order open loop system models should be used for the controller design, which should then be tested on the more representative fourth order full model.
8.Extension to Controller Design
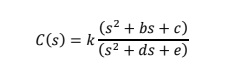
Students are to carry out designs based on more than one 3rd order model G(s) and try and design an alternative controller structure – not just a PID solution. It is recommended to design a second order compensator. One example of a second order compensator may be based on real valued poles and zeros:
and in this case, the controller may be a combination of simple lead or simple lag elements, depending on the values chosen. Another, and more general form, allows the controller poles to be complex, rather than requiring them to be real.
Either form may be achieved by adding appropriate pole and zero elements to the root locus tool or the Bode diagram editor tool, along with a Servoset model G(s).
9.Report :
A report documenting your design should at least address the following areas:
(i) Problem introduction and challenge. You need produce the 3rd and 4th order models G(s) of the Servo set from the provided experimental data sets, and discuss the characteristics of the open-loop Servo set behaviour.
(ii) Compensator Design. Your report should present a complete design process, including your observations, reflections and discussions on the strategy and steps taken to achieve the final design(s) in MATLAB.
(iii) Evaluation of designs, discussion and conclusions. Graphs may be obtained from MATALB and data may be exchanged between the MATLAB Control Systems Design tools. However, data should not be extracted and plotted using any other software package, for example Microsoft Office, or Open Office products. You should implement your controller on the representative 4th order system, accepting the fact that it may not be a good match to your model used in the controller design.
ENG742s1 P24344 Control Systems Coursework 2 – Portsmouth University UK.
There is no need to present excessive background material into the Servo Sset hardware, MATLAB or into the general principles and diagrams associated with feedback and control, or general material in the area of PID controllers. Presented material should be focused and relevant to the specific coursework objectives.
ORDER This ENG742s1 P24344 Control Systems Coursework 2 NOW And Get Instant Discount
Read More :-
ENG742S1 M24344 Control Systems Coursework 1 – Portsmouth University UK.

